丂奺庬曄壔棪寁弌婡峔奺庬偺曄壔棪偼奺彅尦傪帪娫偱旝暘偡傞傕偺偱偡偺偱丄旝暘寁嶼婡傪梡偄傟偽娙扨偵媮傔傞偙偲偑弌棃傑偡偑丄惓尫媦傃梋尫寁嶼婡傪梡偄偰婔壗妛揑偵寁弌偡傞偙偲傕壜擻偱偡丅 偙偙偱偼偙傟傜偺椺偲偟偰丄倓俼乛倓倲丄倓兝乛倓倲丄媦傃倓倶乛倓倲 偺寁弌婡峔傪愢柧偟傑偡丅 丂丂乮侾乯 曄嫍 乮倓俼乛倓倲乯 寁弌婡峔丂丂丂丂傾丏恓楬懍椡偐傜媮傔傞曽朄 恾偵帵偡傛偆偵丄帺懍傪 倁丄揑懍傪 兯丄曽岦妏傪 兝丄媦傃曽埵妏傪 兤 偲偡傞偲丄  暯幩偺応崌偼 兛亖 侽 偱偡偐傜丄  媽奀孯偱偼 嘊 幃傪偦偺傑傑婡峔壔偟偨傕偺偼偁傝傑偣傫偱偟偨偑丄嘊 幃偼 嘋 幃偺寁嶼抣偵 cos兛傪妡偗傟偽壜擻偱偡丅 嘋 幃偼 倁 丒 們倧倱兝媦傃兯丒 們倧倱兤傪偦傟偧傟 梋尫忔朄寁嶼婡峔 偵傛傝寁弌偟偰丄壛尭寁嶼婡峔 偱偙傟傜偺戙悢榓偵傛傝媮傔傞偙偲偑偱偒傑偡丅 師偺恾偼偙偺寁嶼婡峔偺堦椺偱丄媽奀孯偱偼暯幩梡偺幩寕斦偱堦斒揑偵梡偄傜傟偨傕偺偱偡丅  側偍丄暯幩偺応崌丄兤偼孹妏 乮揑娡庱旜慄偲徠弨慄偵懳偡傞捈妏慄偲偺岎妏乯 傪巊梡偟傑偡丅丂偙傟偵傛傝丄揑曄嫍偼 兯丒 倱倝値兤偲側傝傑偡丅 丂丂丂僀丏應嫍偐傜媮傔傞曽朄堦斒揑偵應嫍傪宱夁恾偵昤夋偟偰丄偙傟傪恾昞旝暘寁嶼婡峔偵傛傝昤偐傟偨應嫍嬋慄偺孹幬妏搙傪應掕偡傞偙偲偵傛傝曄嫍傪媮傔傑偡丅 嬨堦幃崅幩婍偵偍偄偰偼丄杸嶤斦傪棙梡偟偨旝暘寁嶼婡峔 傪梡偄偰偄傑偡偑丄偙偙偱媮傔偨曄嫍偼崌惉曄嫍偱偡偺偱丄揑曄嫍傪媮傔傞偨傔偵偼應掕抣偐傜帺曄嫍傪彍偐側偗傟偽側傝傑偣傫丅 恾昞旝暘婡峔 傪棙梡偟偨傕偺偼丄堦斒偵帺曄嫍偵傛傝曄嫍揹岝慄傪忋婰 乮傾乯 偺梫椞偵傛傝媮傔偨帺曄嫍偩偗孹幬偝偣傞傛偆偵側偭偰偄傞偨傔丄揹岝慄偺孹幬偑懌傝側偄晹暘傪揑曄嫍庤椫傪夞偟偰揹岝慄傪應嫍嬋慄偵暯峴偲側傞傛偆偵偡傟偽丄庤椫偺夞揮検偑媮傔傞揑曄嫍偲側傝傑偡丅 壓恾偼偙偺婡峔偺堦椺偱偡丅  丂丂乮俀乯嵍塃曄妏棪 乮倓兛乛倓倲乯 寁弌婡峔丂丂丂丂傾丏恓楬懍椡偐傜媮傔傞曽朄尰嵼嫍棧傪 俼 偲偡傟偽丄愭偺曄嫍寁嶼婡峔偱帵偟偨恾偐傜傕柧傜偐側傛偆偵丄 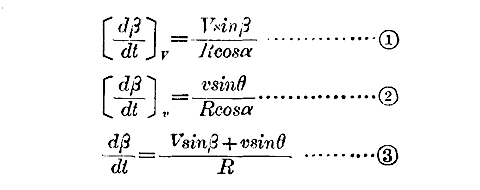 暯幩偺応崌偼 兛亖侽 偱偡偐傜丄  偲側傝傑偡丅 懄偪丄倁 丒 倱倝値兝亄兯丒 倱倝値兤 傪彍朄寁嶼婡偵傛傝 俼 丒 們倧倱兛 枖偼 俼 偱妱傟偽媮傔傞偙偲偑偱偒傑偡丅 壓偺恾偼丄嘋 幃偵傛傞寁嶼婡峔偺堦椺偱偡丅 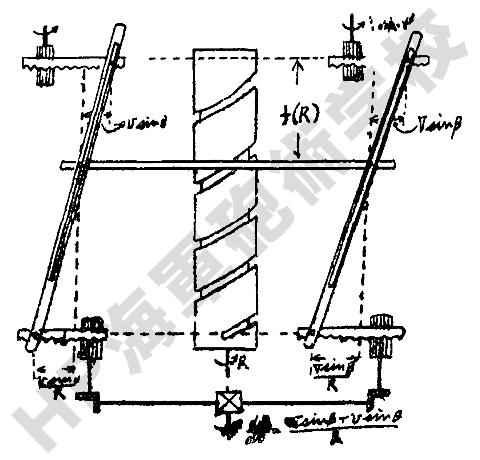 乮拲乯 丗 媽奀孯巎椏偺傕偺傪偦偺傑傑帵偟偰偍傝傑偡偺偱丄戝曄偵尒偵偔偄偱偡偑壗偲偐敾暿偟偰偄偨偩偗傞傕偺偲巚偄傑偡丅 丂丂丂丂僀丏應掕曽岦妏偐傜媮傔傞曽朄忋偺 乮侾乯僀丏偺應嫍偐傜曄嫍傪媮傔傞偺偲摨偠梫椞偱媮傔傞偙偲偑偱偒傑偡丅丂偟偨偑偭偰丄杮婡峔偵偼 恾昞旝暘婡峔 枖偼 杸嶤斦傪棙梡偟偨旝暘寁嶼婡峔 傪巊梡偟傑偡丅 慜幰偼揹扵偺應掕抣側偳偺傛偆偵偦偺應掕抣偵嶶晍偑偁傞傕偺偐傜曄妏棪傪媮傔傞応崌丄偁傞偄偼曄妏棪偑彫偝偔丄偟偐傕惛枾側寁弌傪昁梫偲偡傞暯幩幩寕斦側偳偵梡偄傜傟丄偦偺婡峔偼應嫍恾昞旝暘寁嶼婡峔偲摨偠偱偡丅 屻幰偼崗乆偺捈愙徠弨偵傛傝曄妏棪傪媮傔傞傕偺偱丄曄妏棪偑戝偱偁傝丄偐偮娙扨恦懍偵偙傟傪媮傔傞昁梫偑偁傞堦曽偱丄惛搙偼偦傟掱惛枾偱偁傞昁梫偑側偄傛偆側崅幩幩寕斦偁傞偄偼拞彫岥宎朇梡暯幩幩寕斦側偳偵棙梡偝傟傑偡丅 偙偺婡峔偱偼壓恾偺傛偆側暯峵憰抲傪棙梡偟傑偡偑丄嬨堦幃崅幩婍偱偼旝暘偲愊暘偲傪摨帪偵峴偆寁嶼婡峔傪巊梡偟偰偄傑偡丅 
嶌摦偺奣梫 丗 暯峵斦壓曽偺 俢俥 偵偼嵍懁偐傜崗乆偺尰嵼曽埵妏偑挷掕偝傟丄暯峵斦偺帵恓偼尰嵼曽岦偺曄壔偵廬偭偰夞揮偟傑偡丅丂偙偺応崌丄暯峵斦偺帵恓偺夞揮検媦傃夞揮懍搙偼尰嵼曽岦妏偺曄壔検媦傃曄壔懍搙偵斾椺偟傑偡丅 嵍塃曄妏棪庤椫偵傛傝曄妏棪 乮倓兝乛倓倲乯 傪挷掕偡傟偽栚惙斦偵偙傟傪昞帵偡傞偲嫟偵丄discgear 傪夘偟偰 俢俥 傊塃懁偐傜 佺乮倓兝乛倓倲乯倓倲 傪拲擖偟傑偡丅丂偙傟偵傛傞暯峵斦偺帵恓偺夞揮検偼 佺乮倓兝乛倓倲乯倓倲丄夞揮懍搙偼 乮倓兝乛倓倲乯 偱偁傝丄偐偮偦偺曽岦偼 俢俥 偺嵍懁偐傜拲擖偝傟傞傕偺偲斀懳曽岦偱偡丅 偟偨偑偭偰丄俢俥 偺嵍懁偐傜擖傞夞揮検媦傃夞揮懍搙偲丄塃懁偐傜擖傞夞揮検媦傃夞揮懍搙偑摍偟偗傟偽暯峵斦偺帵恓偼偦偙偱惷巭偡傞偙偲偵側傝傑偡丅 懄偪丄曄妏棪庤椫傪揔愗偵憖嶌偟偰暯峵斦偺帵恓傪忢偵惷巭偡傞傛偆偵偡傟偽丄崗乆偺挷掕曄妏棪偼崗乆偺幚曄妏棪偵摍偟偔側傝丄偙傟偵傛偭偰曄妏棪傪寁弌偡傞偙偲偑偱偒傑偡丅 偟偐偟側偑傜丄娡慏偵偍偄偰偼徠弨偵傛傝媮傔偨崗乆偺曽岦妏偵偼娡庱偺怳傟媦傃摦梙偺塭嬁側偳偑娷傑傟傑偡偺偱丄傆傜偮偒偑惗偠傞偙偲偵側傝傑偡丅丂偙偺偨傔揔摉側曽朄偵傛傝偙傟傜傪彍嫀偟偰曄妏棪傪媮傔傞昁梫偑偁傝傑偡丅 師偺恾偼摦梙媦傃娡庱偺怳傟偺塭嬁傪彍嫀偟偰崌惉曄壔棪傪媮傔傞傕偺偺堦椺偱偡丅丂忋偺恾偵偍偄偰 俢俥 偺嵍懁偵摦梙傪廋惓偟娡庱偺怳傟傪娷傫偩尰嵼曽岦妏傪崗乆拲擖偟丄塃懁偺拲擖検偵偼堄恾揑偵偙偺娡庱偺怳傟傪壛偊偰椉幰傪憡嶦偡傞傛偆偵側偭偰偄傑偡丅 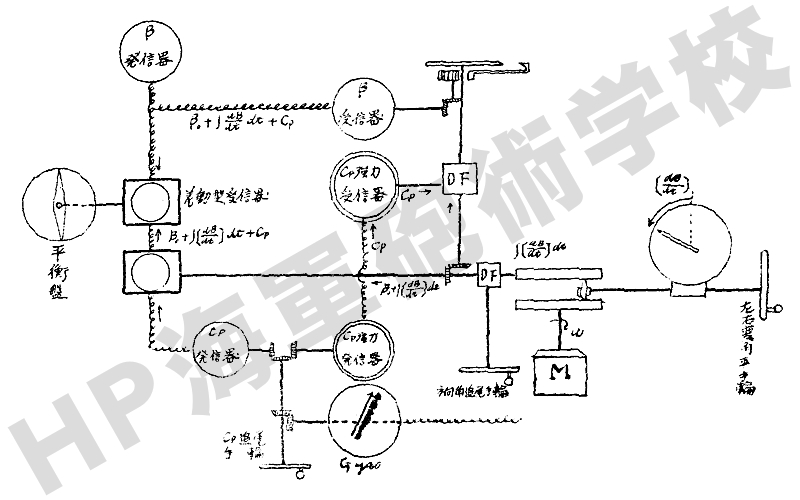
傑偨丄栚昗徠弨偵傛傝摼傜傟偨嵍塃曄妏棪偼丄應嫍偐傜媮傔偨曄嫍偺傛偆偵丄揑媦傃帺娡偺塣摦偵傛傞崌惉曄妏棪偱偡偺偱丄傕偟揑曄妏棪偺傒傪媮傔傛偆偲偡傞側傜偽丄忋婰傾丏崁偱媮傔偨梫椞偵傛傝丄應掕崌惉曄妏棪偐傜帺曄妏棪傪彍偔偙偲偵側傝傑偡丅 師偺恾偼丄忋偺恾偺梫椞偱媮傔偨崌惉曄妏棪偐傜帺曄嫍棪傪彍偒揑曄妏棪傪媮傔傞傛偆偵偟偨椺偱偡丅 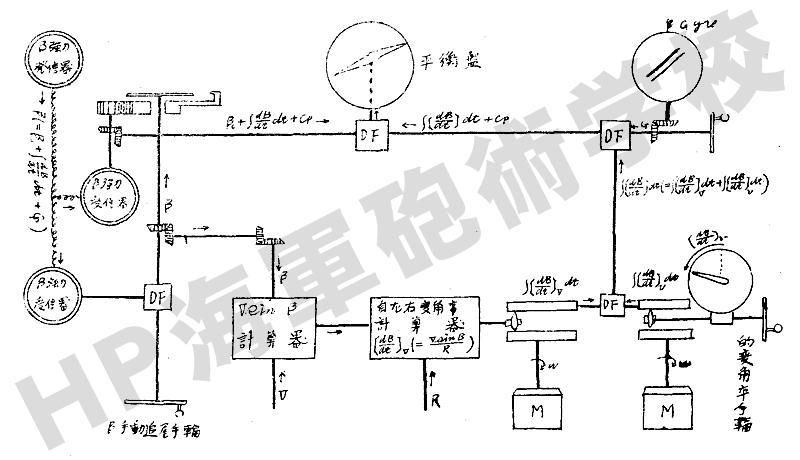
丂丂乮俁乯 墶暘懍 乮倓倶乛倓倲乯 寁弌婡峔慜暸偺 乮俀乯 尰嵼悈暯嫍棧寁弌挷掕婡峔偺崁偱愢柧偟偨梫椞偵傛傝寁弌偟偨尰嵼悈暯嫍棧傪丄惓尫寁嶼婡偵傛傝暘夝偟偰 倃 丒 們倧倱兝 傪媮傔丄偙偺崗乆偺 倃 丒 們倧倱兝 傪暯峴斦壓曽偺 俢俥 偺嵍懁偐傜拲擖偟丄塃懁偐傜偼墶暘懍庤椫偵傛傞 乮倓倶乛倓倲乯 偺愊暘抣傪拲擖偟偰暯峵婍偺帵恓傪惷巭偡傞傛偆偵憖嶌偡傟偽墶暘懍傪寁弌偡傞偙偲偑偱偒傑偡丅 
嵟廔峏怴 丗 18/May/2016 |
幩寕巜婗憰抲婡峔奣梫
巒傔偵
侾丏宆幃偺暘椶
俀丏曽埵斦偺婡峔
丂乮侾乯 栚昗徠弨婡峔
丂乮俀乯 摦梙徠弨婡峔
丂乮俁乯 暯幩梡曽埵斦
俁丏幩寕斦
丂乮侾乯 應揑曽幃
丂乮俀乯 婡峔堦斒丂仼
丂乮俁乯 崅幩婍
係丏徠弨婍
丂乮侾乯 徠弨婍
丂乮俀乯 娙棯徠弨婍
俆丏幩寕巜婗憰抲偺楢寢
丂乮侾乯 楢寢宯摑
丂乮俀乯 楢寢婡峔
丂乮俁乯 敪朇揹楬