目標現在位置諸元計出調定機構目標現在位置の諸元である距離、高度、水平距離、高角、方向角の中で、水平距離 (一部のものでは高度も) 以外は直接測定することが出来ますが、水平距離は距離と高角、または高度と高角とにより間接的に求めなければなりません。 直接測定できるものはそのままこれを調定しますが、間接的に求めなければならないものは一旦適当な計算機構で計出した後に調定しなければなりません、 (1)現在距離、高度、高角、方向角計出調定機構高角及び方向角は直接照準を続けるならば連続的にその値を測定し調定することが可能ですが、距離、高度 (ただし現在距離と高角により連続的に求める場合を除く)、及び電探による測定した高角及び方向角は測定時に調定し得るだけで、しかも測定時に発砲するとは限らないため、現在値が刻々連続的に調定できるようにする必要があります。 即ち発砲経過時に対する修正を要します。 例えば、距離についてはある瞬時における測定値 R0、任意時の現在距離をR、変距を dR/dt とすると、  同様に高度、高角、方向角については、 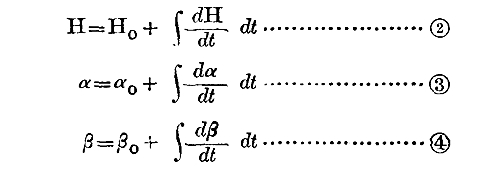 ③ 及び ④ 式は、間接射撃 (例えば電探射撃) の場合のみ必要となります。 旧海軍においては、dR/dt、dH/dt、dα/dt、dβ/dt 等は 摩擦盤を利用した積分機構 (これを 変速機 と言います) を用いて時間的に積分し、そしてこれを 斜接応差歯輪機構 又は 差動型発受信機 を利用した加減計算機 において測定値に加算する方法が一般的でした。 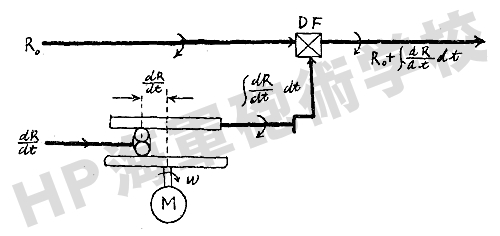
(2)現在水平距離計出調定機構 (高度基準の場合の例)下図のように X = H ・ cot α を α= tan-1(H/X) として計算機に H を調定し、X を手動操作して計出された高度が実高度 α に合致させることにより X を 求め、この値を他の計算機で利用するようにしたものです。 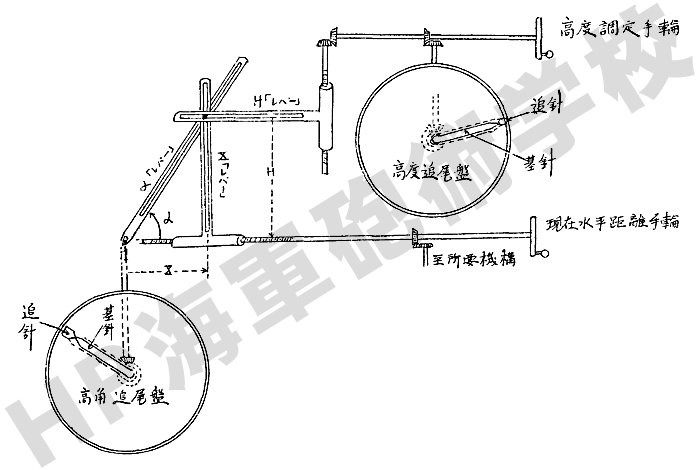
機構の作動概要は次のとおりです。 (a) 高度追尾盤の基針 (実際の H の入力値) に追針を合致するように高度調定手輪を操作することにより、 H レバーを上下させて H を調定します。 (b) 現在水平距離手輪を手動操作して X レバーを移動させることにより α レバーを傾け、これにより高度追尾盤の基針 (実際の α の入力値) に追針を追尾正合させれば、この時の手輪の操作量が求める X となり、これを他の所要機構に伝達します。 単に X を求めるだけであるならば、元の式の形で計出して表示すればよいことになります。 最終更新 : 29/May/2016 |
射撃指揮装置機構概要
始めに
1.型式の分類
2.方位盤の機構
(1) 目標照準機構
(2) 動揺照準機構
(3) 平射用方位盤
3.射撃盤
(1) 測的方式
(2) 機構一般 ←
(3) 高射器
4.照準器
(1) 照準器
(2) 簡略照準器
5.射撃指揮装置の連結
(1) 連結系統
(2) 連結機構
(3) 発砲電路