射撃盤において計出する発砲諸元は目標未来位置に関する関数として表されますので、射撃盤の大部分はこの目標未来位置計出機構が占めることになります。 そしてこの未来位置計出のための諸元となる測的の方式によって種々の射撃盤を生ずることになります。 距離基準と高度基準目標未来位置は、高角 α、距離 R、高度 H、水平距離 X のいずれか2つと方向角の3つの諸元とによって表されるもので、これらの内、直接測定できるものは高角、距離、高度及び方向角です。 ただし、高角及び方向角については直接照準により射撃を行う場合は照準操作により同時に求めることができますが、距離及び高度については別の装置により測定しなければなりません。 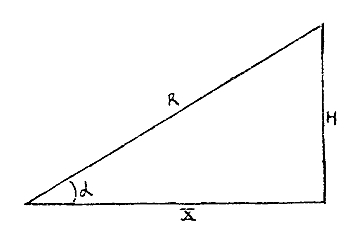
そして、射撃時の状態が基準状態と異なる場合の発砲諸元の修正は、直接砲仰角、砲旋回角及び信管秒時に対して行わなければなりませんが、旧海軍の一部の指揮兵器ではこの方法によるものの、その他の大部分のものでは距離又は高度を近似値的に処理していました。 しかしながらどのような方法であっても、修正量の計出方法は距離又は高度のいずれかを基準とすることになります。 このため、射撃盤について距離を基準とするものを 距離基準 の射撃盤、高度を基準とするものを 高度基準 の射撃盤と称しました。 旧海軍の平射射撃盤では全てが距離基準、また高射射撃盤では一般的に 艦載の高射射撃盤 (高射器) は距離基準、陸用高射射撃盤 (高射器) は高度基準 でした。 距離基準と高度基準の特徴の比較射撃においては、少なくとも砲弾の飛行時中は目標が発砲時点での等速直線運動を継続していることが大前提であり、これがなければ原則的に成り立たないことは申し上げるまでもありません。 等速直線運動においては、目標の高度変化率は一定であり、更に水平等速直線運動であるならば高度は一定ですが、距離は刻々変化し、また変距率も刻々変化します。 したがって、測的の基準を高度とした場合、その変化率は一定あるいはゼロ (0) ですのでその扱いは簡単となり、かつ誤差も小さくなります。 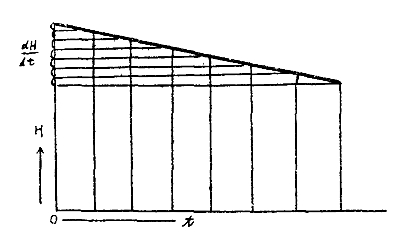
一方、距離を測的の基準とした場合は、変距率も刻々変化しますのでその取扱は複雑となり、かつ誤差が生じる可能性も大きくなります。 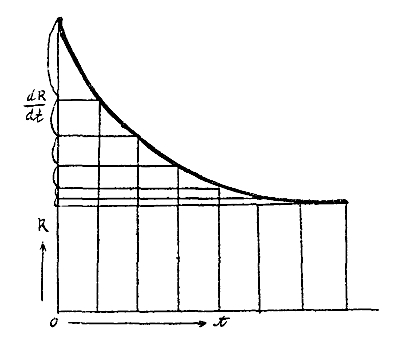
したがって、平射においては距離基準とならざるを得ませんが、高射においては原則的に高度を基準とする方が有利となります。 高度は測高儀により光学的あるいは機械的に一つの操作で求めるものと、距離と高角とを別に測定してこれを光学的、機械的、あるいは電気的に計出する方法がありますが、そのいずれにおいても距離 R と高角 α との関数として求められます。 したがって艦船など動揺がある場合、あるいは高角精度が不良な電探を使用する場合には、これらの高角測定誤差を適切に補正あるいは修正するのでなければ、例え測距誤差がない場合であってもその高角誤差により相当の高度誤差を生じることになり、却って距離基準を用いる方が有利となります。 高度基準の場合では、高角 α と水平距離 X のどちらかと高度 H とにより空間における目標の位置が決まります。 (以後説明の都合上方向角は省略します。) 高度 α と水平距離 X を使用する場合、水平距離 X は高度 H と高角 α との関数として求めなければなりませんが、この時上の ② 式で明らかなように高角 α が小さい場合は僅かの高角誤差あるいは高度誤差でも水平距離 H の大きな誤差となります。 また高度 H と高角 α を使用する場合も、高角 α が小さい時は僅かな高角誤差あるいは高度誤差は ④ 式による目標の直距離の誤差から目標位置に大きな誤差を生じます。 即ち、高度基準において高角が小さい時は目標位置諸元に大きな誤差を生ずることになり、このような場合も距離基準が有利となります。 以上のことを纏めると、距離基準と高度基準の特徴は次の表のようになります。
角速度式、線速度式、的針的速式目標未来位置の諸元は、目標現在位置諸元に対して各見越量を加算すれば求めることができますが、この見越量の測的方式に 角速度式、線速度式 及び 的針的速式 の3つの方式があります。 (1) 角速度式下図において、現在距離 R に対する未来距離を R1、飛行秒時を T、目標未来位置を B とし、測距誤差又は高角誤差により未来距離をR1’(=GD)、未来高度をH1’(=DD’=H1+ΔH1)、飛行秒時を T’ (=T+ΔT) と計出したものとします。 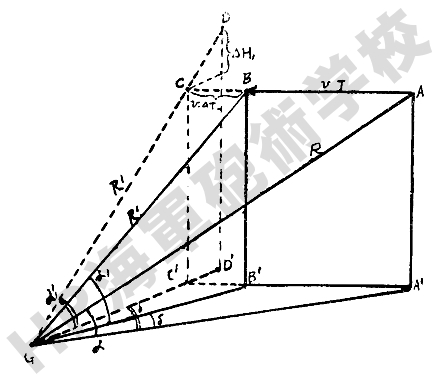
測的誤差のため飛行秒時が ΔT となったことにより、未来高角は α1 がα1’、左右見越はδがδ’と計出されます。 一方、目標は ΔT 秒間に ν・ΔT だけさらに前進して弾着時には C に達します。 もしこの時、C が GD 線上にあるならば、弾着は上下・左右ともに正中して見えます。 この ΔT 秒間における目標の移動量は、 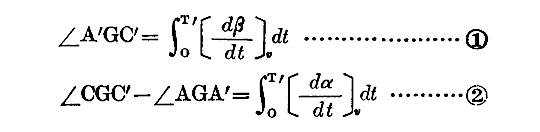
両式の右辺中 dβ/dt 及び dα/dt は目標を刻々と照準することにより求められるものですので、もし測的誤差が無ければ ① 式は計出上下見越 δ’、② 式は計出左右見越 σ’にそれぞれ等しくなります。 したがって、C は GD 線上にあることになります。 (注) : 詳細については 『射撃理論解説 上級編』 で説明する予定です。 (2) 線速度式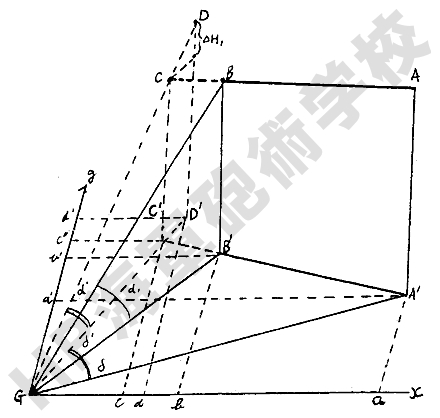
線速度式においても、上図より角速度式に準じて 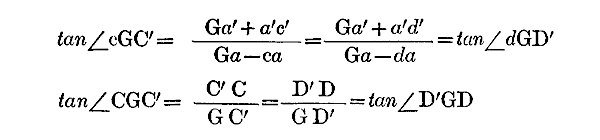
したがって、C は GD 線上にあり、弾着は上下・左右ともに正中して見えることになります。 (注) : 詳細については 『射撃理論解説 上級編』 で説明する予定です。 (3) 的針的速式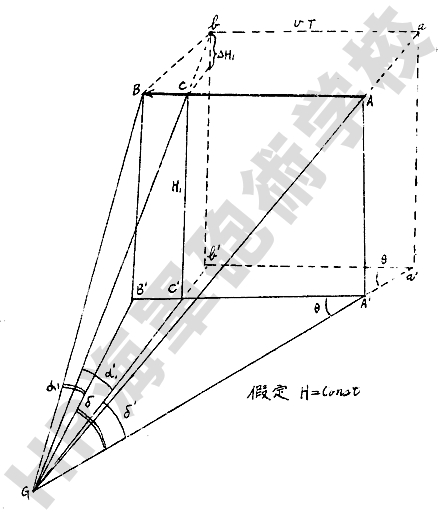 上の図において、仮に発砲時の目標現在位置 A を a の位置にあるものと誤測したとします。 この a の未来位置 b に対する飛行秒時を T とすると、発砲時に A にある目標は T 秒間に νT (=ab) だけ進んで弾着時には B に達します。 この時の計出左右見越を δ’、計出未来高角を α1’、そして飛行時中の実左右変角量を δ、実未来高角を α1 とすると、 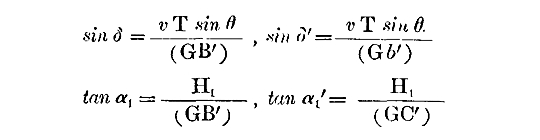
ここで、常に GB’<Gb’ですから、δ と δ’の関係も常に δ<δ’となります。 また GB’と GC’の関係は、近対勢の場合は GB’<GC’であり、α1>α1’となり、遠対勢の場合は逆に GB’>GC’ですので、α1<α1’となります。 即ち、遠 (上) 方向の距離 (高度) に誤差があると弾着は常に後落し、上下は近対勢においては下偏し遠対勢においては上偏することになります。 また誤差が反対の時は弾着の偏倚もまた反対となります。 角速度式、線速度式、的針的速式の特徴の比較(1) 角速度式と線速度式及び的針的速式の関係は、原則的には前述の距離基準と高度基準との関係に類似しています。 即ち、目標が等速直線運動をする時は、線速度式は目標の運動を相互に直交する固定の三軸上に分解しますので、各分速は一定となりますが、的針的速式は目標の運動を一定の的速と変化する的針(方位角)とに分解し、また角速度式は刻々変化する上下・左右の変角率と、一定の高度変化率又は刻々変化する変距とに分解します。 これらの場合、一定の値を保つものを諸元として見越又は未来位置諸元を計出する時は、操作容易にして、かつ精度良好であり、刻々変化するものを諸元とする時は、飛行秒時中の各々の変化に対する補正・修正を適切に処理しなければ、特に的速及び目標高度が大なるに従い、理論的に生起する誤差は大きくなり、また操法誤差も前者に比べて大きくなります。 (2) 角速度式の場合、変角率は照準によりこれを直接求めることができますので、これをそのまま未来位置諸元の計出に使用でき、このため機構、従って操作は簡単となり、測的に要する時間も短くて済みます。 一方、線速度式及び的針的速式は、まず分速あるいは的針的速を計出し、第二段階としてこれらにより未来位置諸元を計出するため、機構、従って操作は複雑となり、測的に要する時間もまた角速度式に比べて長くなります。 ただし的針的速式及び線速度式は、目測値を使用することにより軽便に諸元を計出できる利点があります。 (3) 線速度式は、現在位置諸元を一旦3軸に分解するため、占位差修正は占位差を各軸に分解してこれに加えることにより、如何に大きな占位差であっても簡単に修正することができますが、他の2つの方式でこれを精確に行うためには機構は極めて複雑になります。 ただし線速度式は軸の方向が変化する場合は測的不能となりますので、艦艇においては軸方向固定の処置を採る必要があり、機構は極めて複雑なものとなります。 またこの方式は未来位置諸元の計出を幾何学的に縮図して求めることを要しますので、相当大型としない限り技術上高精度のものは期待できません。 更に、目標が直進を続ける時は、X軸及びY軸上の各分速の大きさは一定ですが、符号は目標の所在象限によって反対となることがありますので、各分速の符号の相異を適当な方法によって処理する必要があります。 もしこれを自動的に行おうとすると機構は複雑となり、人為的にこれを行うとすると操作は極めて複雑となります。 (4) 以上のことから、的針的速式は大口径砲用の平射射撃盤のように対勢の変化が大きくなく、しかも精度良好を必要とするものに適し、角速度式は軽快艦艇の中小口径砲用の平射射撃盤及び艦載用・陸用の高射射撃盤(高射器)のように迅速簡易に測的を完了することを要し、かつ精度も前者ほどには要求されないものに適します。 線速度式は、陸用、特に長射程高角砲用の高射射撃盤(高射器)のように、軸方向を固定し、大きな占位差に対する修正も容易であり、かつ精度が良好であることを要求される場合に適することになります。 ただしこの場合高射射撃盤は大型のものとする必要があることは既に述べた通りです。 (5) 距離誤差又は高度誤差による弾着の上下・左右偏倚については、角速度式及び線速度式の場合は誤差があるとしてもその他の測的操作に誤差がなければ上下・左右は正中して見えますが、的針的速式の場合は的針的速に誤差が無い時も偏位して見えることが他の2つの方式との大きな差異となります。 これらのことを纏めると、3つの方式の徴は次の表のようになります。
測的方式による射撃盤の総合測的方式によって射撃盤を分類するときは、距離基準角速度式射撃盤、高度基準線速度式高射射撃盤などと呼称します。 旧海軍においては一般に、大口径砲用の平射射撃盤は距離基準的針的速式、中口径砲用の平射射撃盤は距離基準角速度式、また艦載用の高射射撃盤 (高射器) は距離基準角速度式、陸用高射射撃盤は多くは高度基準角速度式または高度基準線速度式 が用いられていました。 最終更新 : 12/May/2016 |
射撃指揮装置機構概要
始めに
1.型式の分類
2.方位盤の機構
(1) 目標照準機構
(2) 動揺照準機構
(3) 平射用方位盤
3.射撃盤
(1) 測的方式 ←
(2) 機構一般
(3) 高射器
4.照準器
(1) 照準器
(2) 簡略照準器
5.射撃指揮装置の連結
(1) 連結系統
(2) 連結機構
(3) 発砲電路