 |
|
||||||||||||
射法理論 (その1) |
魚雷射法の射法計画を論じるためには、まずその基礎となる数理的な理論、いわゆる 射法理論 について理解する必要があります。 本項ではこの射法理論の内、次の事項についてその一般的な概要をご説明します。
| (1) 射三角概説 |
| (2) 射三角細説 |
| (3) 魚雷の精度 |
| (4) 散布帯 |
| (5) 魚雷の効果 |
(1) 射三角の定義
魚雷発射法のところで既にご説明してきたように、魚雷の速力の不定、雷道の縦面及び横面進路の不規、並びに目標の針路速力 (=的針的速) の不定などは極めて複雑な問題であり、これを数理的に正確な値を求めることは不可能なことです。
したがって、魚雷射法においては、目標 (敵艦) は平面上を一定速力で一定方向に航行する ものとし、魚雷もまたこれと同様にして直進する ものと仮定すると、これらの関係を三角形で表すことができます。 これを 射三角 と言います。
(2) 射三角関係の用語 (術語)
射三角関係で使用される術語には、次のようなものがあります。
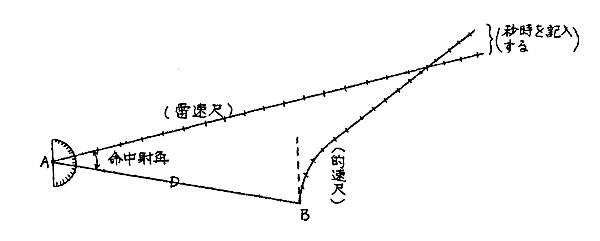
(3) 命中射三角
射三角において、次の式が成り立つ場合の三角形を 命中射三角 と言い、その時のそれぞれの諸元を 命中射角、命中方位角、命中的速 ・・・・ 等と言います。
したがって、命中射三角は魚雷が上図のC点において目標に命中する、即ち偏倚量が無い場合の射三角であると言えます。
この場合において、魚雷の発射に必要な 命中射角 を求めるには次の方法があります。
イ. 計算により求める法
ロ. 次の調定射三角の図で示すように、機械的に近似する三角形を作って求める法
ハ. 目標の運動力要素 (増減速、転舵回頭) を加味して作図により求める法
雷速 (V)、的速 (S) 及び照準距離 (D) を一定とすると、目標の方位角によって射角が決定されるため、命中射三角における命中点 (C) は下図のような軌跡を画きます。 この時、C1、C2 等はそれぞれ雷速と的速との速度比の内分点及び外分点となります。
(4) 調定射三角
方位盤、あるいは発射指揮盤に調定する雷速、的速、方位角、射角をもって構成する三角形を 調定射三角 と言い,調定する先の諸元をそれぞれ 調定雷速、調定射角 ・・・・ 等と言います。
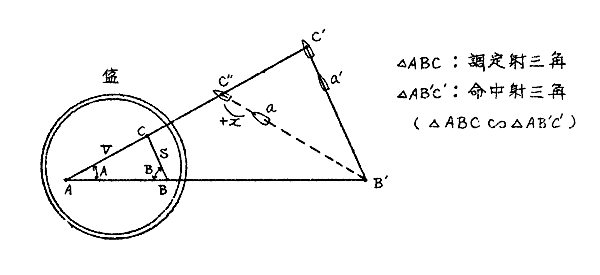
調定射三角において、調定方位角及び調定的速に実際と異なった値を調定した場合の影響は、次のとおりです。
イ. 調定方位角が実際と異なる場合
△ABC'' となり、目標の存在点 a に対して偏倚量 +X を生じます。
ロ. 調定的速が実際と異なる場合
△AB’C’において目標の存在点 a’ に対して偏倚を生じるため、△AB’C’は命中射三角ではなくなります。
ハ. 調定方位角及び調定的速共に異なる場合
上記の如く偏倚を生ずることもあり、またそれぞれの誤差が相殺して命中することもあり得ます。
(1) 命中射角の求め方 (運動力要素を加味しない場合)
イ. 計算による方法
ロ. 機械的に求める方法
(イ) 方位盤又は発射指揮盤による調定射三角による方法
(ロ) 簡易計算尺を作成して求める方法
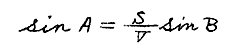
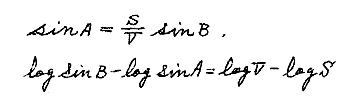
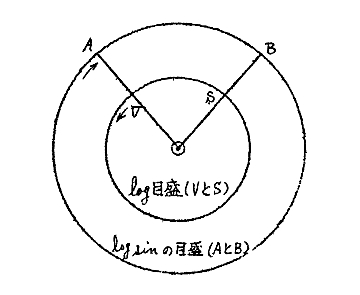
次の式により対数計算尺の原理を利用して、下図のような簡易計算尺を作成して求める。 即ち、雷速 (V)、的速 (S)及び方位角 (A) を計算尺に設定することによって射角
(A) を求めることができる。
(2) 命中射角の求め方 (運動力要素を加味する場合)
魚雷発射に際して、目標が回避した場合には目標が定針した後の新しいデータによる命中射三角を求めるべきですが、目標の回避開始時期、回避量や目標の運動力要素などが不確実、不明な状況なため数式の適用は不可能になります。
したがって、次の状況を想定した作図などが必要になります。
イ. 発射と同時に目標が回避した場合
ロ. 発射後のある時間経過後に目標が回避した場合
ハ. 発射時に既に目標が回避中の場合
これらの想定における作図の一例を下に示します。
(3) 命中射角の性質
命中射角 (A) と、的速 (S)、雷速 (V)、方位角 (B)、照準距離 (D) との関係は次のとおりとなります。
イ. 的速が大きくなる程、命中射角も大きくなる。 ( Sin A ∝ S )
ロ. 雷速が大きくなる程、命中射角は小さくなる。 ( Sin A ∝ 1/V )
ハ. 方位角が大きくなる程、命中射角も大きくなる、方位角が90度の時に命中射角は最大となる。 ( Sin A ∝ Sin B )
方位角 (B) と方位角 (180度−B) に対する命中射角は同じ値である。
ニ. 命中射角の大きさは、照準距離の大きさとは無関係である。
的速 (S) 又は雷速 (V) に1kt の差がある場合、命中射角 (A) の差は方位角 (B) が90度の時に最大で、90度より増減するに従って減少します。
また、方位角 (B) に10度の差がある場合、命中射角 (A) の差は方位角 (B) が90度の時に最小で、90度より増減するに従って増大します。
(4) 運動力を加味する場合と加味しない場合の比較
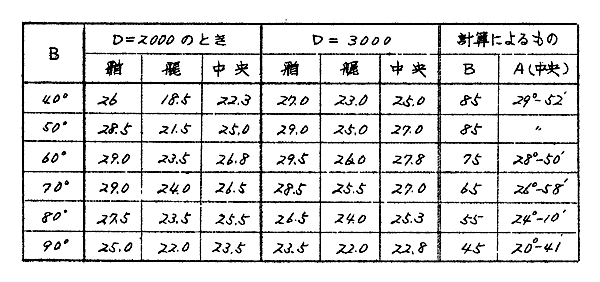
一例として、次の場合を考えてみます。
雷速 (V) = 38kt、 的速 (S) = 19kt、 方位角 (B) = 40〜90度
照準距離 (D) = 2000m 及び 4000m
目標は魚雷発射と同時に外方へ 45度回避する。
この条件で射角を算定したものが、次の表になります。
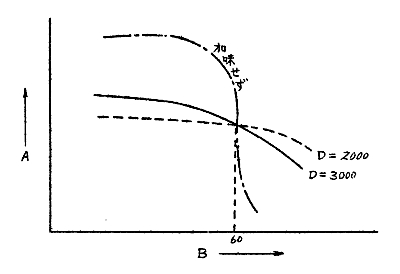
即ち、下図のように、計算によると射角 (A) は余弦曲線 (Sine Curve) を画きますが、運動力を加味すると射角の変化はこの曲線から離れてそのの変化は小さくなります。
(5) 射程 (R) と照準距離 (D) の関係
射程 (R) と照準距離 (D) との関係は次の式で表され、その値は相互に比例します。

(6) 最大有効照準距離
魚雷の能力は 雷速 (V)×射程 (R) で表されることになりますが、この値はそれぞれの魚雷固有のものであり、かつ雷速と射程は反比例の関係にありまから、ある雷速における最大射程は一定になることになります。
したがって、この雷速とその最大射程とから、逆に魚雷発射時の照準距離は目標の的速及び方位角によって制限されることになります。 つまり、雷速 (V)、最大射程 (R)、的速 (S) 及び方位角 (B) によって 最大有効照準距離 が決まってきます。
最大有効照準距離は、上記 (5) の計算式によって求めることができます。
この最大有効照準距離は、次の事項を検討する上で必要になってきます。
イ. 射点の選定
ロ. 目標が回避する場合に魚雷が到達可能かどうか算定
ハ. 適当な魚雷能力 (雷速と射程) の決定
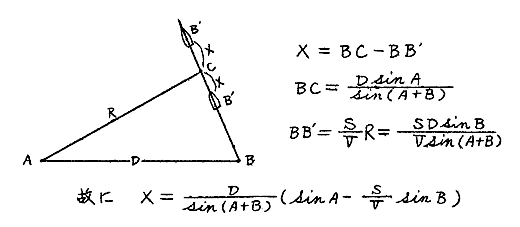
(7) 偏倚量(X)
既にご説明してきましたように、魚雷を目標に命中させるための命中射角は、予定の雷速と測定又は推定した的速、方位角及び照準距離基礎として求めるものですから、これらの諸元に実際との誤差があれば当然ながら求めた命中射角は正しい値とは差が生じますので、発射した魚雷は目標に命中せずに偏倚した点を通過することになります。
運動力を加味しない場合の偏倚量 (X) の求め方は、次の式によります。
上記の式に対して、実際の的速を S’、方位角を B’、雷速を V’とすると、次のように表せます。

ここで、V=V’、即ち調定雷速に誤差がない場合は、

V=V’かつ S=S’、即ち調定雷速及び調定的速に誤差がない場合は、

また、V=V’かつ B=B’、即ち調定雷速及び調定方位角に誤差がない場合は、

以上のことから、偏倚量 (X) の性質をまとめると、次のとおりになります。
イ. 調定雷速 (V) に誤差が無い場合
X ∝ D : 目標に肉迫して発射する程、偏倚量 (X) は小さくなる。
X ∝ 1/V : 高雷速になるほど、偏倚量 (X) は小さくなる。
ロ. 調定雷速 (V) と調定的速 (S) に誤差が無い場合
方位角 (B) が 90度よりやや大きいところで後方最大偏倚となる。
ハ. 調定雷速 (V) と調定方位角 (B) に誤差が無い場合
S’<S ならば、前方偏倚となる。
S’>S ならば、後方偏倚となる。
ニ. ある一定の射角差 (△A) に対する偏倚量の差 (△X) は一般に方位角 (B) が大きくなる程大きくなります。
Bを 90度以下とすると、方位角 (B) と方位角 (π−B) に対する射角は同一ですが、射角差が約10度に対する偏倚量は方位角 (B) に対するものは、方位角
(π−B) に対するものに比べて極めて小さい。 これは 後方射点を不利とする一因 です。
なお、運動力を加味する場合には一般的には作図により求めます。
(8) 誤差猶予と回避猶予
発射した魚雷が目標艦に対して命中を期待し得る(又は目標隊の列線通過を期待し得る)射角、雷速、方位角、及び的速の許容誤差範囲を 誤差猶予 といい、それぞれの調定諸元について 射角誤差猶予 ・・・・ 等、あるいはそれらの全部又はいくつかを合わせたものを 合成誤差猶予 と言います。
即ち、これらの調定諸元にある程度の誤差があったとしても、目標の艦や隊は点ではなく目標幅がありますから、なお命中を期待できるわけです。
したがって、誤差猶予は、いま目標の一点を照準してこれに対する射角で発射した場合に的速、方位角及び雷速にどの程度の誤差があっても命中を期待し得るのか、あるいは逆に、ある的速、方位角及び雷速において命中を期待できる射角の範囲はどの程度か、等を検討するために必要になります。
また、魚雷発射の際に目標が回避した場合でもなお命中(又は列線通過)を期待し得る最大回避量を 回避猶予 と言い、変針、一斉回頭、変速によるものをそれぞれ 変針猶予、斉動猶予 及び 変速猶予 と言います。
この誤差猶予は、目標の回避により発射した魚雷が届かない最大射程外に出る場合、あるいは単一射線のみではなく多数射線に対して目標が回避し得る場合にも、その最大回避量についても用いられます。
(9) 近接雷速と衝撃雷速
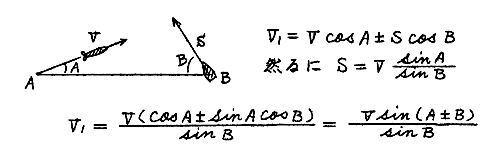
照準線の方向に対する雷速及び的速のそれぞれの分速の合計を 近接雷速 (V1)と言います。
即ち、魚雷が目標に命中する時には、丁度連続照準中の照準線上をこの近接雷速をもって駛走するように見えます。 つまり相対運動における相対速力に当たります。
近接雷速は、次により求めることができます。
また、魚雷命中時における衝撃速力を 衝撃雷速 (V2) と言い、次により求めることができます。
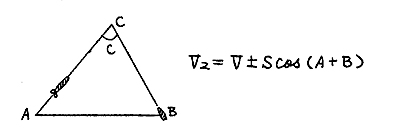
衝撃雷速は、雷速との関係により次のように区分されます。
V2 > V の場合 : 逆衝撃
V2 < V の場合 : 追衝撃
V2 = V の場合 : 横衝撃
この衝撃雷速は、魚雷の起爆装置の研究上は勿論のこと、雷撃実施上も爆発尖の最小爆発速力と共に理解しておく必要があります。 この衝撃については、後の 「魚雷の効果」 の項でもう少しご説明します。
最終更新 : 27/Aug/2011