「目標未来位置」 の決定まず 「目標未来位置」 の決定について、最も単純化して説明することにします。
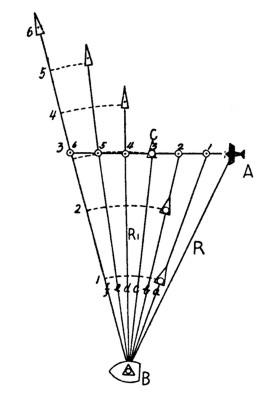
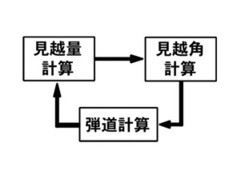
以上のことを総合すると、a 及び b の場合は発砲時の目標線 (照準線) から目標の運動の前方に対する見越の角度が少な過ぎ、逆に d 〜 f の場合は見越の角度が多き過ぎたことを意味します。 そして、c の方向が適正な見越であり、c 点が 目標と弾丸の未来位置が一致した点 = 命中という事実を示す点 です。 つまり、目標未来位置の決定とはこの点を求めること であり、そしてその点をいかにして求めるかの方法が 未来位置決定理論 になります。 目標未来位置 c を表すには、射撃艦側からのデータで表すのが便利ですから、この場合は “c の方向で3秒後の位置” と言います。 また、c の方向を正確かつ現実的に表すためには、照準線 (発砲時現在の目標線) から目標の進行方向に ∠ABC の方向を言うべきであり、この角度を 見越角 と言います。 目標未来位置決定上の大前提 (仮定)目標の未来位置を決定するに当たって、絶対的条件となるものは 目標は等速直進運動をする と言うことです。 弾丸が発射された以降において目標が回避運動 (変針変速) をしたとしても、それは射撃艦側で予測することは出来ません。 したがって、目標の未来位置はあくまでも発砲時の目標の運動が継続するものとして考えなければ、射撃の問題は解決することが出来ないことはお解りいただけると思います。 ただし、この仮定はあくまでも目標未来位置決定上の場合の問題であって、射撃をどのように実施して目標の回避運動をカバーするかという問題とは別のことであることに注意して下さい。 対空ミサイルなどは、まさにこの発射後の目標の回避運動をカバーする一つの解決方法であるとも言えます。 とは言え、この対空ミサイルシステムにおいても、その射撃指揮装置における目標の未来位置決定はあくまでもこの大前提 (仮定) に基づいていることは言うまでもないことです。 ところが、最近になってその大前提 (仮定) を放棄しなければならない事態が生じてきました。 そう、皆さんよくご存じの 弾道ミサイル防衛システム です。 航空機や通常の大気圏内でのミサイルと異なり、超高速でかつ 非直進運動 をすることが明らかな弾道ミサイルを邀撃するためには、目標の未来位置決定においても “非直進運動” を前提としなければなりません。 したがって、この目標未来位置の決定 (測的を含む) だけをとったとしても、そのための複雑かつ大量な計算を迅速に行うために 極めて高速・高性能なコンピューターが必要 となることは簡単にお解りいただけるでしょう。 目標運動見越計出と弾丸飛行秒時計出上記で見てきましたように、目標未来位置とは弾丸の飛行秒時中に移動する目標位置です。 したがって、その位置の決定のためには、目標運動見越という要素ともう一つ、弾丸飛行秒時、言い換えれば弾道データの要素の2つが必要になってきます。 そして、目標未来位置決定のための運動見越計出に必要な弾丸飛行秒時は、目標未来位置の関数ですが、その目標未来位置もまた弾丸飛行秒時の関数です。 つまり、目標未来位置と弾丸飛行秒時は循環的な相関関係にあり、このため連立方程式の解法が必要になります。 しかし、この様な相関関数を理論的、数学的に処理することは困難であり、これをこのまま射撃の解法に採用することは不適当なことです。
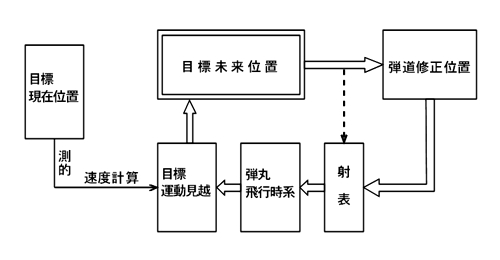
しかしながら、後述の弾道理論のところでご説明するように、射表の値は基準状態のものであり、実際の射撃時には大気条件その他から当然この基準状態とは異なってきます。 これを補正するために、元来の目標未来位置に修正を加えた架空の目標位置、即ち弾道当日修正位置 (前進位置とも言います。) を設定し、この位置に対する弾道当日修正を含んだ弾丸飛行秒時を得るようにしています。 この弾道当日修正については、後述の弾道理論のところを参照して下さい。 以上の目標未来位置決定のプロセスを図示すると、次のようになります。
最終更新 : 10/May/2015 |