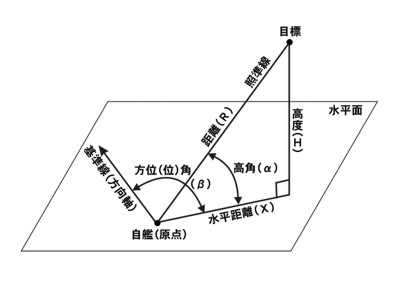
「目標現在位置」 の定義まず 「目標現在位置」 という用語について、定義しておく必要があります。 何故なら、ごく一般的な意味では “目標の現在の位置” と言うことになりますが、射撃理論での意味はちょっと異なるからです。 射撃理論で言う 「目標現在位置」 とは 発砲瞬時における目標の位置 と定義されます。 では、射撃指揮装置や砲側照準器で追尾している目標の、その瞬間、瞬間の位置は何と呼べば良いのでしょうか? 実はこれもその位置データに基づいて “射撃計算をする” と言う前提に立つ限り全て 「目標現在位置」 です。 つまり、射撃理論における 「目標現在位置」 とは、砲弾を狙った目標に命中させるために射撃計算をする、その計算上の基準点となる目標位置、と言うことが出来ます。 ですから、射撃指揮装置などで連続して射撃計算をしているならば、追尾している目標の位置は常に 「目標現在位置」 でもあるわけでし、また、皆さんが手計算で射撃計算の問題を解こうとする場合には、その問題で設定された時刻における目標の位置が 「目標現在位置」 と言うことになります。 これを概念的に図示すると、次のように表すことが出来ます。 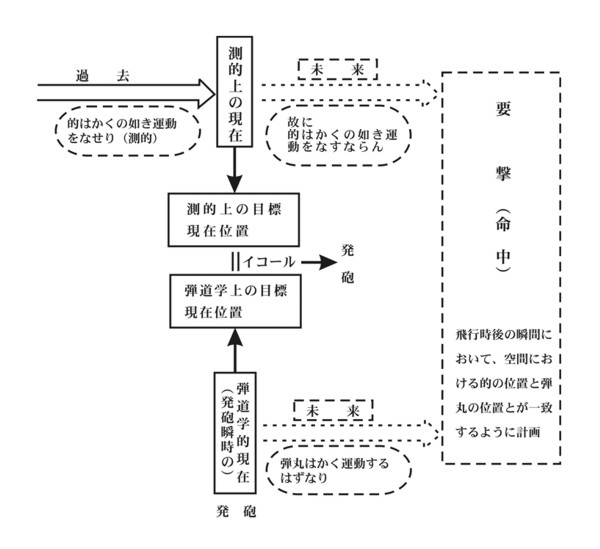 目標現在位置諸元目標現在位置は、射撃計算で用いる (又は、射撃指揮装置で使用する) 座標系と基準系とをもって表現されます。 そして、常に次の2つのことをが前提となります。 (1) 目標現在位置は照準線 (LOS, Line of Sight ) の上にある。 この前提の基に、どのような座標系、どのような基準系を使用しようとも、目標現在位置はその原点からの角度の量、方位、及び線分の量の組み合わせて表されます。 具体的には、「座標系 (座標方式)」 の項中の各座標系でご説明したとおりで、方位、高角、距離の組み合わせです。 例えば、旧海軍の使用した用語・記号体系 によれば、現在距離 (R)、現在方位 (β)、現在高角 (α)、現在高度 (H)、現在水平距離 (X) の諸元による組み合わせによって表されます。 この組み合わせによって、次のような6種類が可能です。
更には、旧海軍では用いられませんでしたが、既にご説明した直角座標によって表す方法もあります。 射撃指揮装置が発達した現在では、この直角座標を用いることが多くなっております。 また、上記の6種類の内、(1)及び(2)以外の (3)〜(6) は、射撃理論としてはほとんど用いられることはありません。 余談ですが、それでは (3)〜(6) が全く用いられないのかというとそうではありません。 実際、旧海軍には(5)の方式のものがありました。 それは、ヴィッカース式の高射装置を改良した 二式陸用高射器 です。 旧海軍がこの方式を採用したのは、日本の生産力が需要に追いつけなくなった戦争後半、目標が等高度・等速・直線運動をするという仮定 さえ我慢すれば、計算機構が簡単になり、量産向きの射撃指揮装置が設計できたからです。 このような状況下で、理論が技術に貢献したことになったのですが、現実はこの量産向きの射撃指揮装置でさえもなお生産が間に合わず、更に簡略化された他のものに努力を向けざるを得ませんでした。 (注) : 緑文字は、米海軍及び海上自衛隊での用語、記号を表します。 それ以外は原則として旧海軍の用語、記号です。
最終更新 : 10/May/2015 |