射撃盤の機構概要射撃盤の機構の主要部は、目標現在位置諸元計出調定機構、目標未来位置諸元計出機構、及び発砲諸元計出機構の3つに別れます。 目標未来位置諸元計出機構の大部分は各種の見越計出機構 であり、また 発砲諸元計出機構の付加機構として弾道修正、占位差修正、その他の発砲諸元修正機構 があります。 これらの諸機構は一般に前項の測的方式に応じ射撃理論に基づく1つの系統の流れとして構成されるのが普通です。 測的における距離基準及び高度基準のそれぞれについて、これらの諸機構の一般的な流れを示すと次のようになります。 (注) : 図において占位差修正や動揺修正、並びに循環系統で主なもの以外は省略しています。 1. 距離基準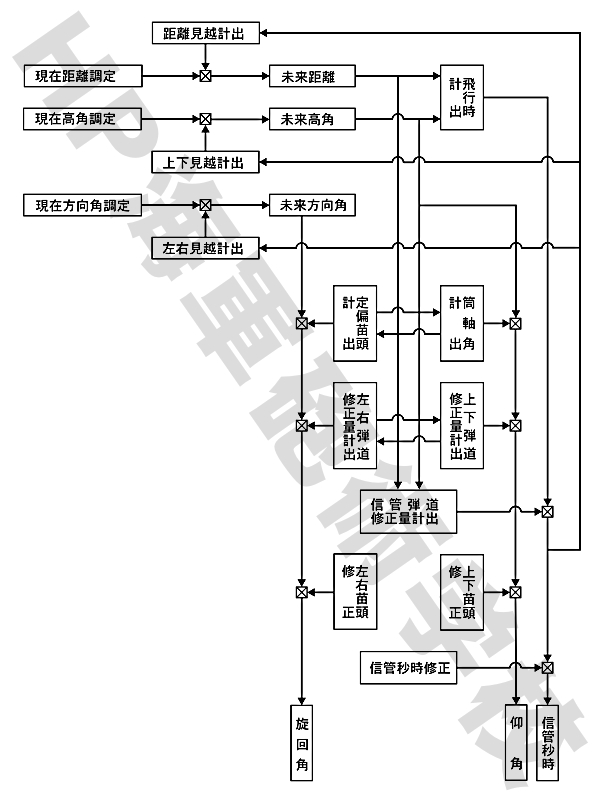
(1) この図は未来距離と未来高角により目標未来位置を決定する方式における諸元計出の代表的なものです。 (2) 平射においてはこの図から高角系統を除いたものになります。 2. 高度基準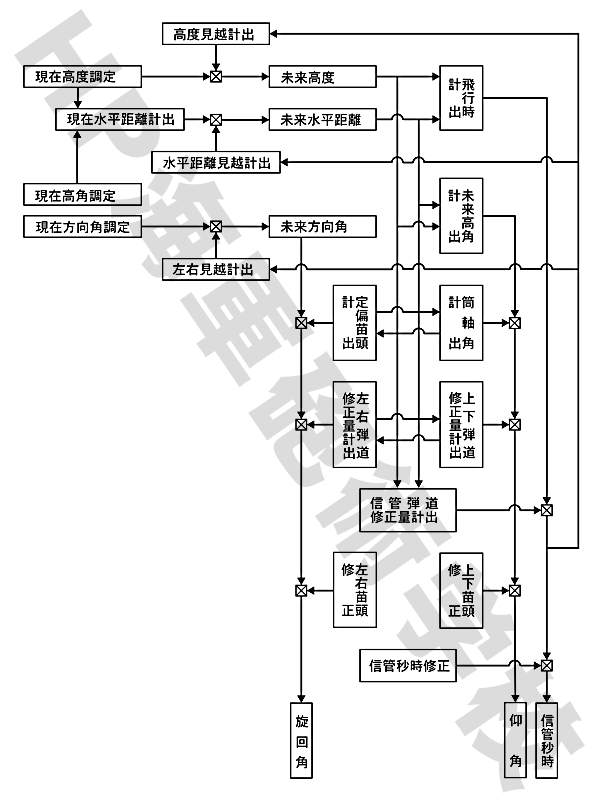
(1) この図は未来高度と未来水平距離により未来位置を決定する方式における諸元計出の代表的なものです。 (2) 高度と直距離により目標位置を決定し、かつ高度基準方式を用いるものの場合は、この図の 「水平距離」 を 「各直距離」 に置き換える他は同一です。 (3) 未来高度と未来高角により目標未来位置を決定する方式の場合は、1.の距離基準における未来高角と同一の要領で求めた 「未来高角」 を、この図の 「未来水平距離」 に置き換えて所要の機構とする他は同一です。 3.射撃盤の機構区分距離基準及び高度基準において、旧海軍における射撃盤の一般機構は次のように区分して考えておりました。 (1) 目標現在位置諸元計出調定機構 (2) 目標未来位置諸元計出関係機構 (3) 基準発砲諸元計出機構 (4) 発砲諸元修正量計出機構 最終更新 : 13/May/2016 |
射撃指揮装置機構概要
始めに
1.型式の分類
2.方位盤の機構
(1) 目標照準機構
(2) 動揺照準機構
(3) 平射用方位盤
3.射撃盤
(1) 測的方式
(2) 機構一般 ←
(3) 高射器
4.照準器
(1) 照準器
(2) 簡略照準器
5.射撃指揮装置の連結
(1) 連結系統
(2) 連結機構
(3) 発砲電路